深度学习和神经网络(CS231n Note)
1. 神经元模型与数学模型(Neuron Network Unit)
大脑的基本计算单位是神经元(neuron)。人类的神经系统中大约有860亿个神经元,它们被大约$10^{14}-10^{15}$个突触(synapses)连接起来。下面图表的左边展示了一个生物学的神经元,右边展示了一个常用的数学模型。每个神经元都从它的树突获得输入信号,然后沿着它唯一的轴突(axon)产生输出信号。轴突在末端会逐渐分枝,通过突触和其他神经元的树突相连。
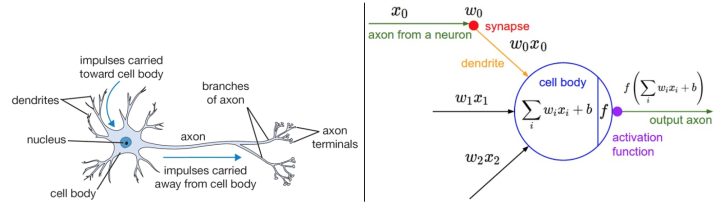
神经元(Neuron)通过树突(Dendrites)接收输入信号,沿着轴突(axon)产生输出信号。轴突在末端分叉,通过突触和其他神经元的树突相连。
输入信号($x_0,x_1,…,x_n$)传递到其他神经元的树突,基于突触的突触强度相乘($w_0x_0,w_1x_1,…,w_nx_n$)。突触的强度(权重$w$)可以控制一个神经元对另一个神经元的影响强度,使其兴奋(正权重)或抑制(负权重)。输出信号如果高于阈值,则神经元激活(对应于激活函数$f(\sum_{i}w_ix_i+b)$)。
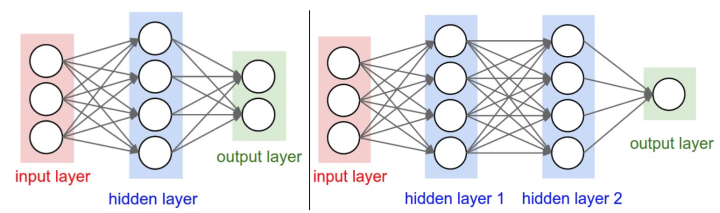
1 多层感知机
输入层 -> 隐藏层 -> 输出层
2. 常用激活函数
| 函数 | 值域 | 导数 | 备注 | |
|---|---|---|---|---|
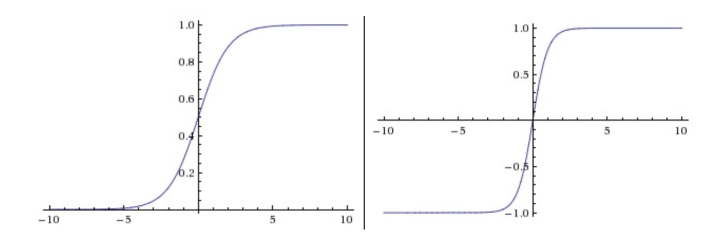
| sigmoid | $ \sigma(x)=\frac{1}{1+e^{-x}} $ | [0,1] | [0, 0.25] $\sigma’(x)=\sigma(x)(1-\sigma(x))$ | 分类概率 |
| tanh | $tanh(x)=\frac{e^x-e^{-x}}{e^x+e^{-x}}$ | [-1,1] | [0, 1] $tanh’(x)=1-(tan(x))^2$ | |
| relu | $relu(x)=max(0, x)$ | $[0,+\infty]$ | $f’_x=\begin{cases}0, x<0 \\="" 1,="" x="">0 \ undefinded, x=0 \end{cases}$ |
sigmoid
优点:
- 分类概率
缺点
- 梯度容易饱和而丢失,激活函数在接近0,1时会饱和,如果权重过大,很容易失去梯度
- 函数不经过0,不以0点对称,在中间点0.5附近的的梯度较小(0.25),梯度总体较小,不利于梯度传播
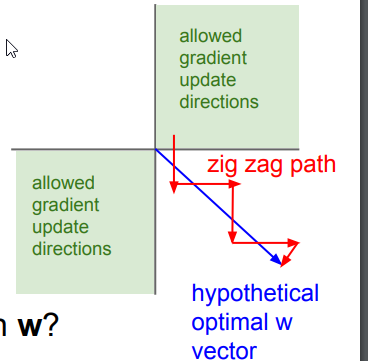
- 激活值永远全为正(负),下一神经元的输入总是正数(负数),则反向传播过程中梯度更新呈z字型
- exp指数函数计算复杂
tanh
$tanh(x)=2\sigma(2x)-1$
优点:
- 范围更大 [0, 1]
- 以 0 为中心点
- 中间部分梯度更大,有利于梯度传播
缺点:
- 梯度饱和而丢失的情况仍然存在
relu
优点
- 收敛速度更快(e.g. 6x than sigmoid/tanh)
- 计算简单
- 梯度不会饱和
缺点
- 可能导致部分神经元“死掉”,永远不会被激活。输出值始终为负,激活值为0,梯度为0,反向传播不更新此神经元的梯度。降低学习率来降低神经元“死掉”的概率。
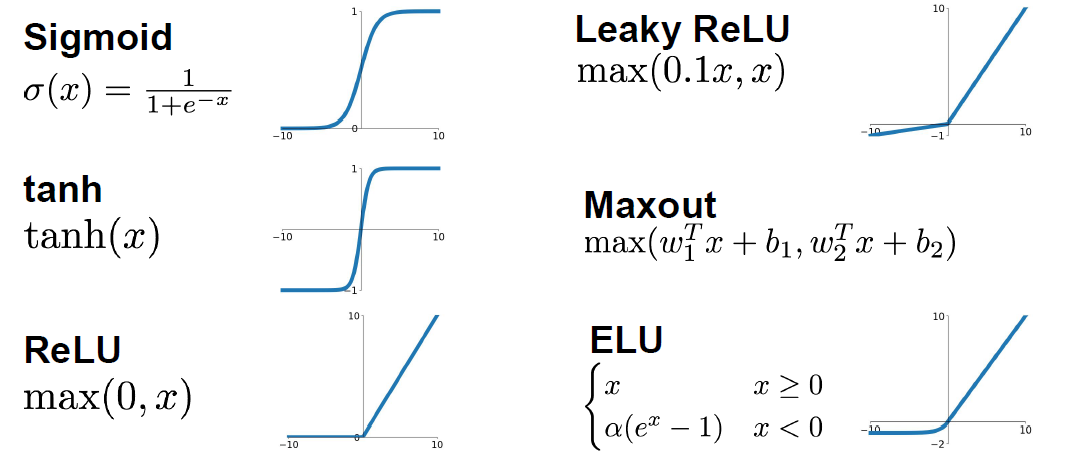
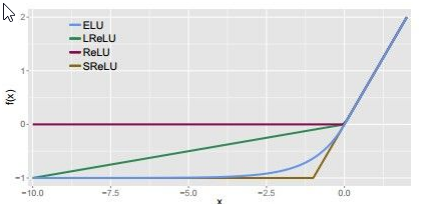
Leaky Relu
解决Relu死亡的问题
$$f(x)=\begin{cases}x, x>0\\alpha x, x<0\end{cases}$$, $\alpha=0.01$
ELU
$$f(x)=\begin{cases} x, x>0\ \alpha(e^x-1), x\leq0\end{cases}$$
Maxout
$$max(w_{1}^Tx+b_1, w_{2}^Tx+b_2)$$
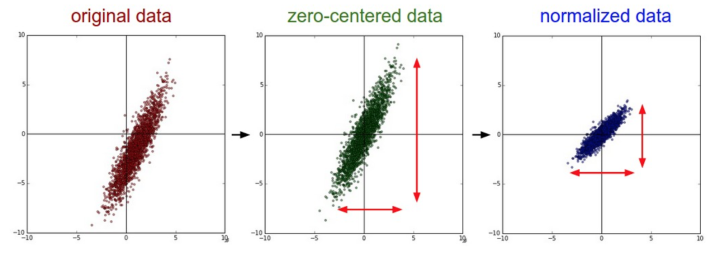
3. 数据预处理
归一化 Normalization
1 | # 数据归一化 |
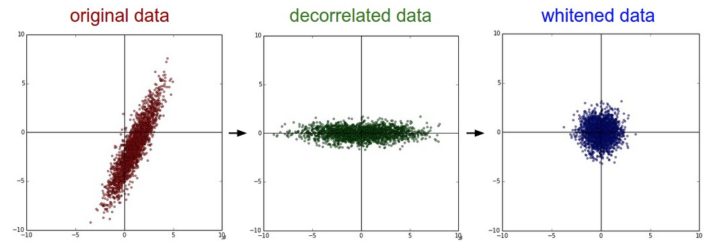
PCA 白化(很少在深度学习中使用)
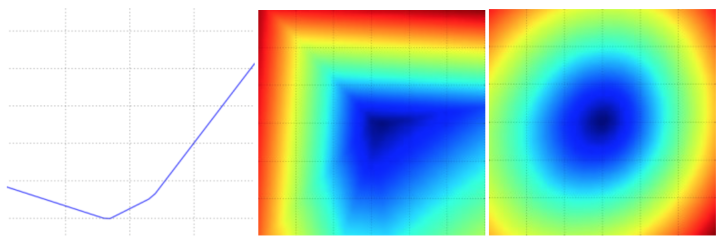
PCA/白化。左边是二维的原始数据。中间:经过PCA操作的数据。可以看出数据首先是零中心的,然后变换到了数据协方差矩阵的基准轴上。这样就对数据进行了解相关(协方差矩阵变成对角阵)。右边:每个维度都被特征值调整数值范围,将数据协方差矩阵变为单位矩阵。从几何上看,就是对数据在各个方向上拉伸压缩,使之变成服从高斯分布的一个数据点分布。
CIFAR 数据PCA
nx3072 维向量(图片32x32x3),协方差矩阵:3072x3072
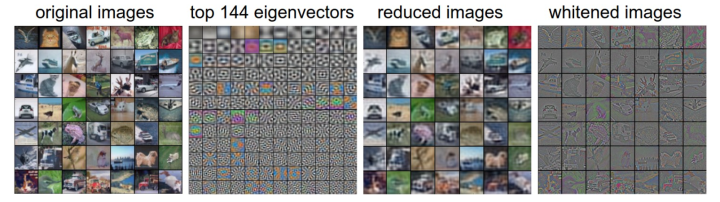
1: 49张图片。2: 3072个特征值向量中的前144个。3: 49张PCA降维的图片(U.transpose()[:144,:])。4: 白化后的数据。144个维度的方差都压缩到相同的数值范围(U.transpose()[:144,:])。现在较低的频率(代表了大多数方差)可以忽略不计了,较高的频率(代表相对少的方差)就被夸大了。
4. 权重初始化
小随机数初始化
基于均值为0,标准差为1的高斯分布
1 | W = 0.01 * np.random.randn(N, D) |
使用$\frac{1}{\sqrt{n}} $校准方差
数据量增大,随机初始化的神经元输出数据分布的方差也增大
1 | W = np.random.randn(N, D) / np.sqrt(N) |
He Normal
网络中神经元的方差应该是$\frac{2}{n}$
当前的推荐是使用ReLU激活函数,并且使用w = np.random.randn(n) * sqrt(2.0/n)来进行权重初始化
1 | W = np.random.randn(n) * sqrt(2.0/n) |
偏置初始化 biases
1 | b = np.zeros(n,) |
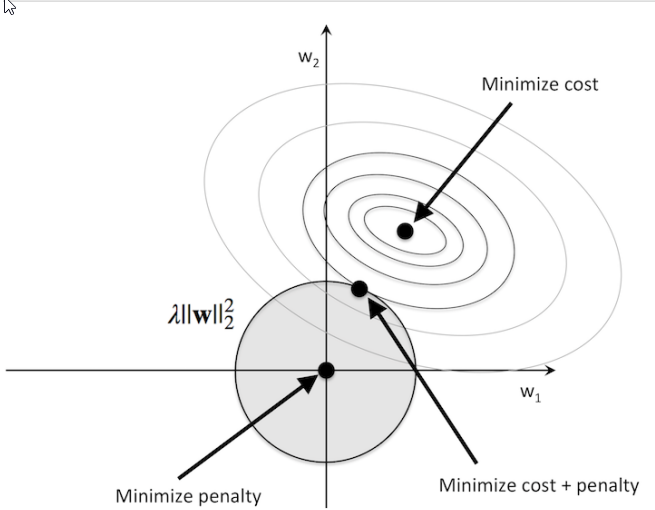
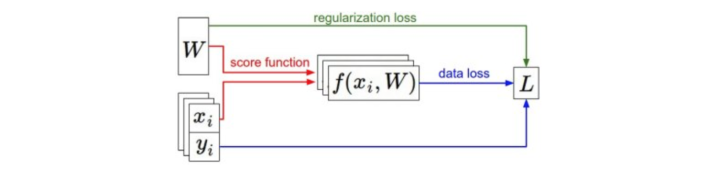
5. 正则化
L1 正则
L2正则
References:

![[公式]](/2019/06/17/deep-learning/optimization/equation.svg) 可能会时大时小,不是单调变化。这就可能在训练后期引起学习率的震荡,导致模型无法收敛。
可能会时大时小,不是单调变化。这就可能在训练后期引起学习率的震荡,导致模型无法收敛。